研究内容
Research Topic
空間情報研究室では下記のような研究に取り組んでいます。
衛星測位システム(GNSS)
GNSS(Global Navigation Satellite System)は米国のGPS、わが国の準天頂衛星システムQZSSをはじめ、ロシアのGLONASS、EUのGalileo、中国のBeidouなど、世界各国のシステムを用いた測位実験による精度評価を行っています。
- ネットワーク型RTK法の一種であるVRS(Virtual Reference Station)は、GPS、QZSS、GLONASS、Galileoの組合せで精度評価をしています。
- QZSSから放送される補正情報を用いてセンチメータ級測位を行うCLAS(Centimeter Level Augmentation Service)はGPS、QZSS、Galileoの組合せで精度評価をしています。
静止状態、歩行による低速移動、車両による高速移動で様々な周辺環境での実験を行って測位特性を評価しています。



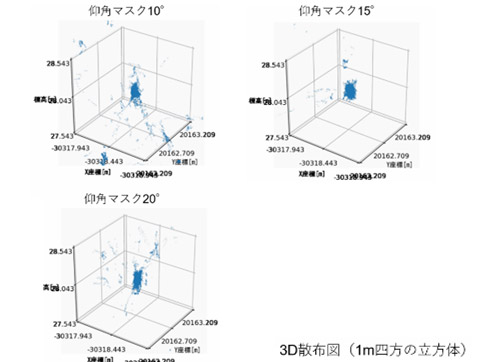
【出典】山田 真:QZSSのセンチメータ級測位補強サービスにおける最適な仰角マスク設定値の検証,卒業論文,2020年度.
レーザスキャナによる点群計測(TLS)
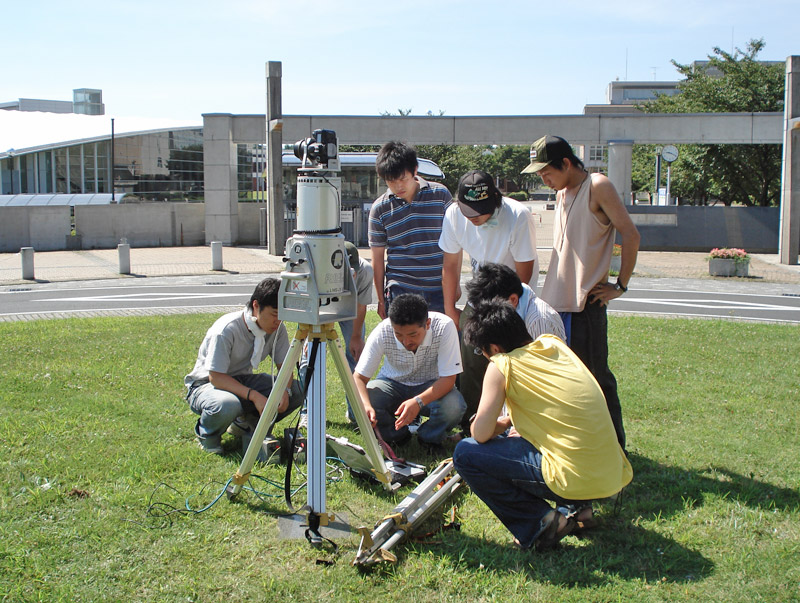
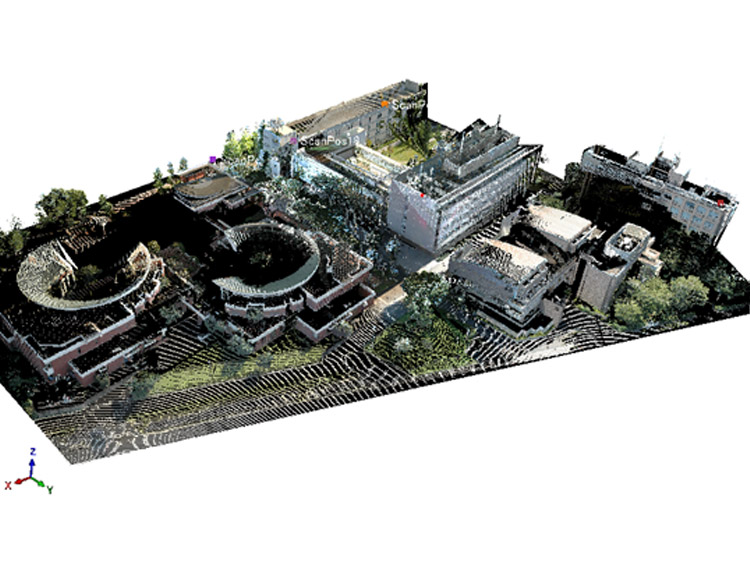
3次元レーザスキャナ(Terrestrial Laser Scanner)はレーザを使って路面や建物、樹木などの地物の表面の形状を測る装置であり、 周辺の地形を短時間に膨大な量の点群として測ることができます。
- TLSを使って船橋キャンパスの3次元可視化モデルを作成しました。
- 交通総合試験路の路面を計測し、レベル(水準測量)で計測した標高値と比較することで路面計測の精度検証を行っています。


【出典】樋口智明:地上型レーザースキャナーによる舗装工事の出来形測量の運用方法に関する研究,修士論文,2019年度.
モービルマッピングシステム(MMS)
モービルマッピングシステム(Mobile Mapping System)とは車両で道路を走行しながら、 道路舗装面や標識などの道路付帯物、沿道の建物などの形状を測定して地図や3次元モデルを作成するシステムです。車両にはGNSS、IMU(慣性航法装置)を装着して位置と方向を正確に測定すると同時に、 デジタルビデオカメラや2次元レーザスキャナを搭載して道路面と沿道の地物を計測してデータ化します。
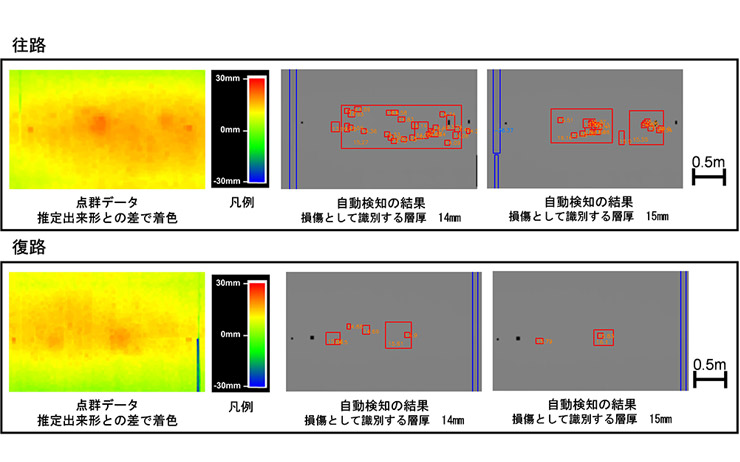
道路の白線を抽出し道路線形を推定する研究、歩道部を計測した点群データを使って、段差や急勾配などのバリアを検出し可視化する研究などを行っています。最近では
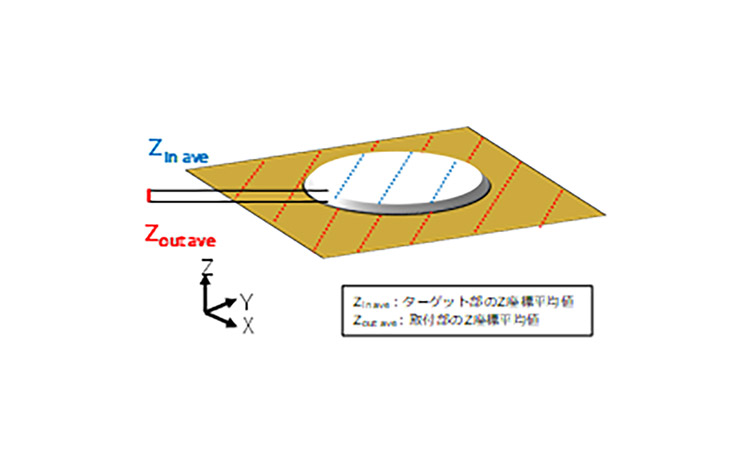
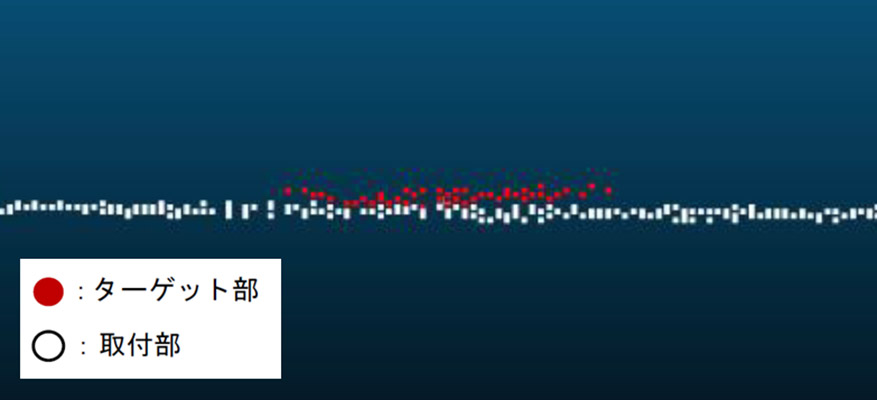
- 学内の交通総合試験路などを利用して走行速度やGNSS衛星の観測条件が道路面や側壁部の凹凸(層厚)検出精度に与える影響に関する実験
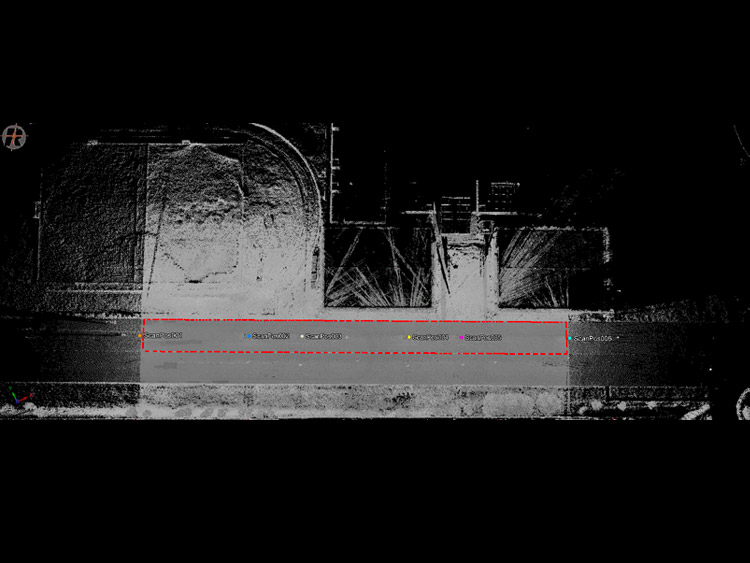
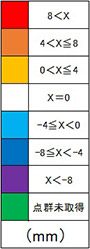
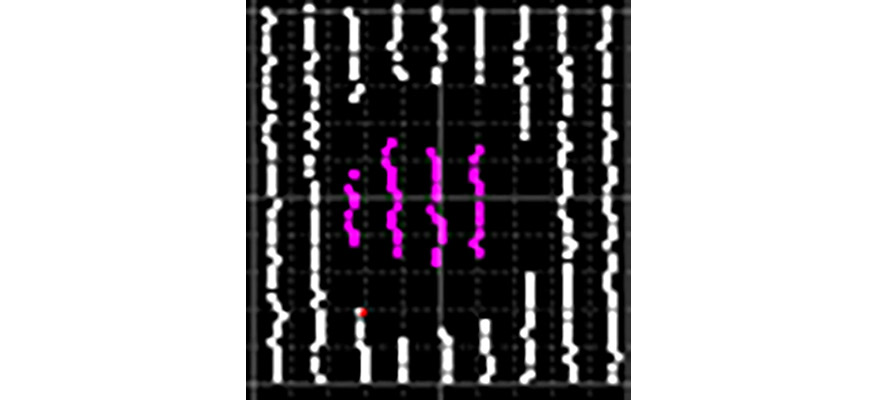
- 福島ロボットテストフィールドでのトンネル走行計測によりトンネル壁面の模擬うきを検出する実験
を行いました。

【出典】藤村大輔・笹野拓海・山口裕哉・白石宗一郎・岡本直樹・岩上弘明・ 佐田達典・江守 央:位相差方式レーザスキャナを搭載したMMSによる層厚検出精度の基礎的研究,応用測量論文集,No.31,2020.

【出典】山下翔雅・山口裕哉・白石宗一郎・岡本直樹・岩上弘明・佐田達典・江守 央:MMSにより計測したトンネルの3次元点群に輪郭抽出手法を適用したうきの自動検知に関する研究,応用測量論文集,No.34,2023.
鉄道MMS
鉄道計測に特化したシステムとして開発されたTrimble GEDO GX50を用いて,模擬駅空間で実験を行い,点群取得範囲とレール間隔やプラットフォームとレールとの離隔距離など寸法計測精度の実証を行いました。

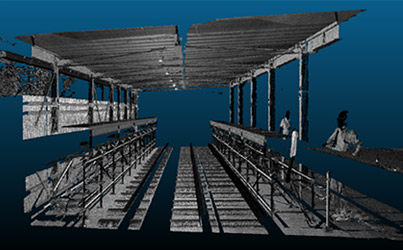
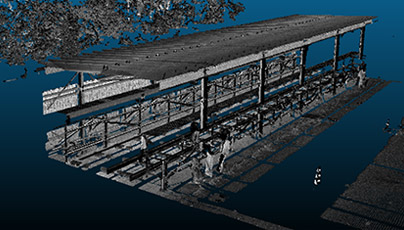
【出典】佐田 達典・芦澤 憂紀・正親 優汰・岡本 直樹・室井 和弘・岩上 弘明・江守 央:鉄道空間計測用レーザスキャンシステムによる模擬駅空間の点群取得範囲と寸法計測精度に関する検証,応用測量論文集,No.35,2024.
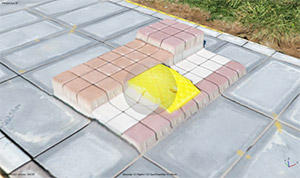
フォトグラメトリ
フォトグラメトリとは対象物を複数の角度から撮影し,組み合わせることで高密度な3次元点群データを生成する技術です。
レーザスキャナに比べて安価な機器を用いた計測で三次元点群データを取得することができます。 通常のカメラ撮影だけでなくUAVを用いて上空から撮影し3次元点群モデルを生成しテクスチャーモデルを作成しています。



仮想現実(VR)
VRは専用のヘッドアップディスプレイを用いて仮想空間に入り込む技術です。建設分野では事故対策教育などで活用されています。
VRを用いて駅空間を再現し案内表示の見やすさを評価する研究を行っています。

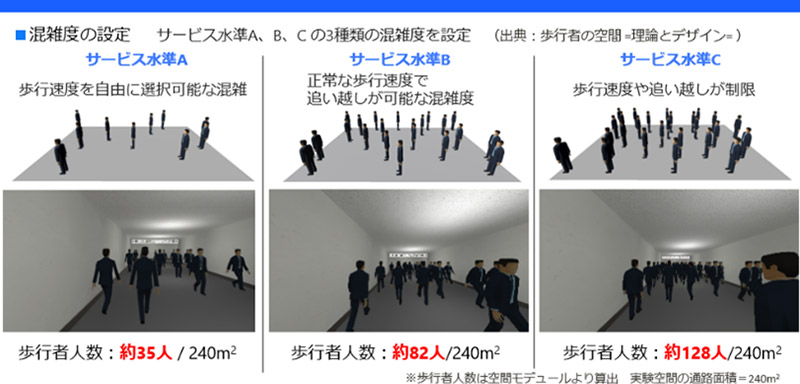
【出典】木戸慎也:VRを用いた健常者視点と車いす利用者視点における混雑度を考慮した吊下げ型サインの判読範囲に関する研究,修士論文,2021年度.
UAVレーザ
UAVにレーザスキャナを搭載したシステムを用いて、福島ロボットテストフィールドのトンネル内の計測を行い、点群データの精度と取得範囲を検討しました。

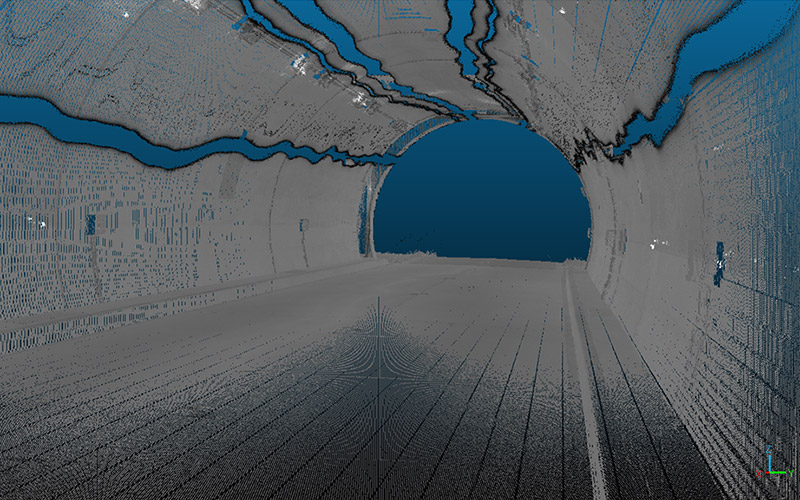
【出典】加藤 創大・日野原 遼生・佐田 達典・岡本 直樹・室井 和弘・岩上 弘明・江守 央:標定点補正及び飛行条件によるUAVレーザ計測を用いたトンネル内点群データの位置精度検証,応用測量論文集,No.35,pp.41-50,2024.
Lidar SLAM
Lidar SLAMはGNSSやIMUを利用することなく、予め計測したベースマップのLidar点群と計測時のLidar点群をマッチングすることで自己位置推定を行う技術です。船橋キャンパスの交通総合試験路でシステムを搭載した車両の走行速度や点群マッチィング範囲を変えた実験を行い、それらの影響度を検証しました。

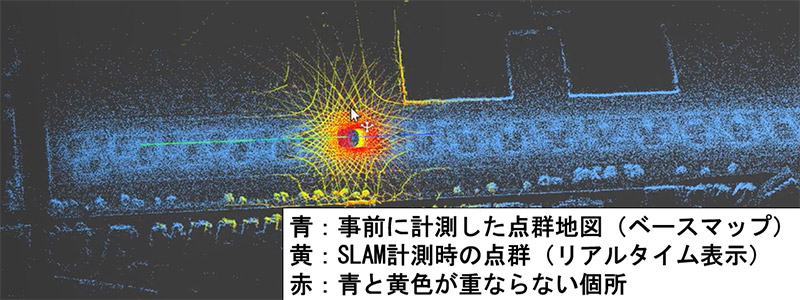
【出典】佐田 達典・山口 裕哉・岡本 直樹・室井 和弘・岩上 弘明・内藤 丈登:Lidar SLAM装置を搭載した車両の走行速度が自己位置推定精度に及ぼす影響評価,第49回土木情報学シンポジウム講演集,2024.
地中レーダ
VRS用GNSS受信機と車速センサを備えた地中レーダにより、埋設管と空洞の位置が既知の試験ヤードでの測定を行い、管の材質・径と検知の可否・空洞の形状・寸法・深さと検知の可否を検討し、位置検出精度を求めました。

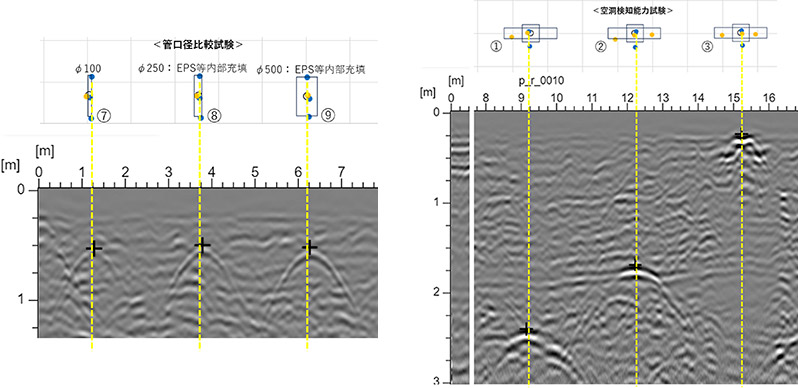
(左:埋設管,右:空洞)
【出典】佐田 達典・山口 裕哉・岡本 直樹・室井 和弘・岩上 弘明・福井 巧海:GNSS受信機と車速センサを備えた地中レーダによる埋設管と空洞の位置検出の精度評価,第49回土木情報学シンポジウム講演集,2024.